Your cart
There are no more items in your cart 






Available
€6.90
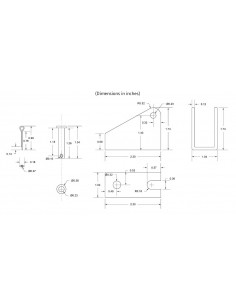
Mounting braket for linear actuator. Very practical for opening a hatch for example. It supports a force of 250 kg for the light version compatible model MPP-EC or MPP-ECH MPP-CCS Two pieces are recommended at each end of your linear actuator.












{kind=link}
{kind=link}